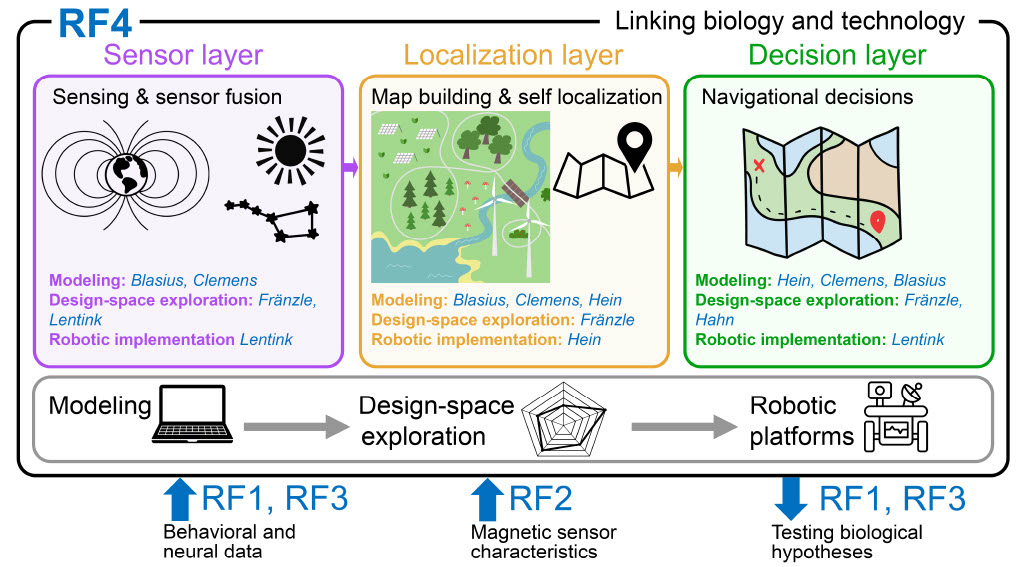
Animals and robots or autonomous vehicles encounter very similar challenges in movement and navigation: They need continually take decisions on optimal movement and interactions with their environment based on sensory information. In RF4, we will generate and parametrise biological hypotheses of animal navigation and test their validity in computer simulations and bio-inspired robots. By testing the hypotheses, we can study whether our systems show the same performance and make the same mistakes as animals. Further, we will explore whether the animal navigation principles and mechanisms can be used to inspire concepts for technical navigation systems resilient to a much broader set of environmental disturbances than current technology can offer.
Animals integrate input from many less precise sensors, whereas technical systems only rely on a few accurate sensors. Therefore, e.g. autonomous moving devices often fail in unpredictable situations. With the gained knowledge, we can inspire concepts for more robust technical systems from which the society could benefit.
Involved fields of expertise: Automation and measurement technologies, bioinspired robotics, mathematical modelling, computational neuroscience, safety-critical cyber-physical systems and zoology.
Mainly involved Project leader: Jan Clemens, Axel Hahn, David Lentink, Andreas Hein, Martin Fränzle
Designated speaker of RF4: David Lentink